
camera_CTA-MST-NectarCam_20191120_majority-3nn#
The full file can be found in the Simulation Model repository here.
The first 30 lines of the file are:
# File generated with: cta.nectarcam.montecarlo.gen_camera_config_file(pixel_shape=3, reference_corner=2)
# and complemented with 3nn majority trigger definitions obtained from the
# previous camera definition file via 'pixel_remap_trg --rotate 90'.
#
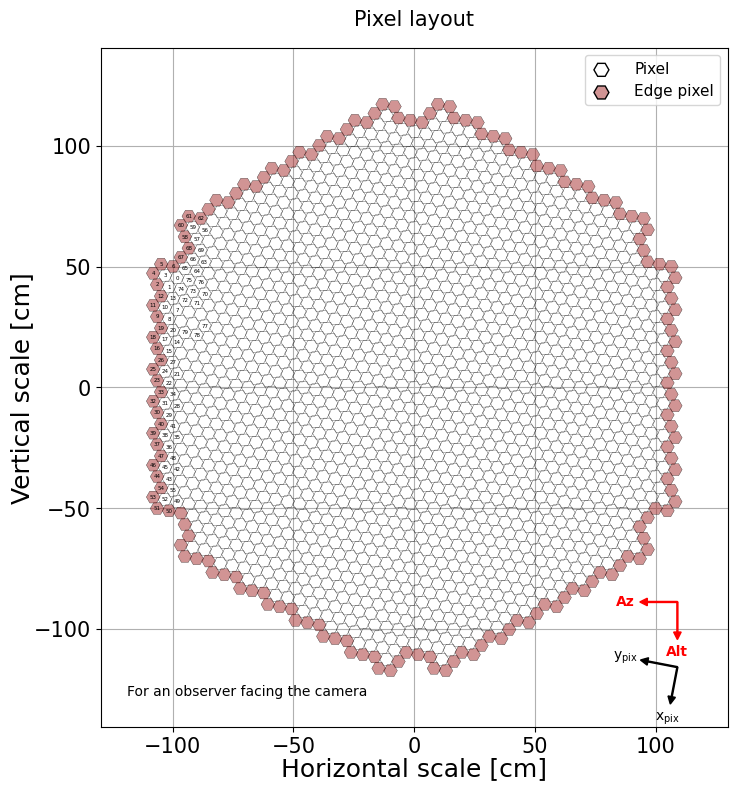
# Modular camera with 265 modules of 7 pixels each.
# Each of the 1855 pixels has a size of 4.900 cm (flat-to-flat, hex. funnel hori.).
# Between pixels is a gap of 0.100 cm. Pixel spacing is 5.000 cm.
# The pixel spacing corresponds to 0.102 deg at f=28.00 m for pixel plus any gap.
# The camera has a nominal diameter of 2.280 m (radius 1.140 m), resulting in a
# nominal field-of-view diameter of 4.66 deg at a focal length of 28.00 m.
# Pixel centers are within a radius of 1.179 m (max. pos. FoV diameter 4.822 deg.).
# All pixel corners are within 1.205 m (max. corner FoV diameter 4.930 deg.).
# The edge starts at a radius of 1.098 m (contiguous FoV diameter 4.490 deg.).
# Mean radius of camera edge is 1.134 m (mean FoV diameter 4.637 deg.).
# Area covered by pixels+gaps: 4.016 m^2 (equivalent radius: 1.131 m, FoV 4.62 deg.)
# The angular efficiency of funnels is read from file 'hess_funnels_r78.dat'.
# Funnels walls are assumed to have an average reflectivity of 78.0%.
#
# Trigger conditions correspond to those in camera_CTA-MST-NectarCam_majority-3nn.dat,
# taking into account the 90 degree rotation between the pixel coordinates (before 'Rotate').
# PixType format:
# Par. 1: pixel type (here always 1)
# 2: PMT type (must be 0)
# 3: cathode shape type (see below)
# 4: visible cathode diameter [cm]
# 5: funnel shape type (see below)
# 6: funnel diameter (flat-to-flat for hexagons and squares) [cm]
# 7: depth of funnel [cm]